
| Status: Active Development | Latest Update: July 2025 - First Thermal Flight |

Overview
Building autonomous drone systems for wildlife management, focusing on thermal imaging and edge ML for animal detection and tracking.
Current Application: Autonomous wild hog detection using thermal imaging and edge classification.
Tech Stack: Python • ROS • Gazebo • OpenCV • TensorFlow • Ardupilot • Pixhawk • Raspberry Pi • NVIDIA Jetson Orin Nano • FLIR Boson
Problem
Wildlife management (particularly wild hog control) requires extensive manual surveillance across large properties. Traditional methods are time-intensive and provide limited coverage.
Solution
Autonomous drone system that:
- Flies pre-programmed search patterns over target areas
- Captures thermal imagery during flight
- Runs edge ML classification to identify animals
- Sends real-time notifications when target animals detected
- Tracks animal movement patterns over multiple flights
Secondary capabilities:
- Precision landing system using depth camera and QR code detection
- Long-range operation (60km theoretical, 2 miles tested)
- 45+ minute flight time
- Night operations with LED indicators
Current Status
Operational:
- Autonomous GPS waypoint navigation
- 2 mile range tested (60km theoretical with CUAV P8 radios)
- 45 minute flight time
- Basic offboard control via ROS
- Video transmission system (WFB-NG)
In Development:
- Precision landing algorithm (Realsense D435i depth camera + QR codes)
- Thermal image classification model
- Ground station integration (Pelican case portable system)
- LED control and sequencing for night ops
Next Milestone (2025):
- Flight test precision landing system
- Thermal camera integration and range testing
- Failsafe and guardrail validation
Hardware
Airframe: HolyBro X500 (10” frame) with 12” props Flight Controller: Pixhawk 6x (PX4) Compute: Raspberry Pi 4 + NVIDIA Jetson Orin Nano Cameras: Intel Realsense D435i (landing), FLIR Boson (thermal) Comms: CUAV P8 radios (60km), Alpha WiFi antenna (video TX) Power: Custom 3D printed battery holder
Technical Challenges
Solved:
- Long-range telemetry and video streaming
- Power distribution for multiple high-draw peripherals
- ROS/PX4 integration for offboard control
Active:
- Ground loop issues with PDB-powered peripherals
- Gazebo sensor simulation for precision landing algorithm development
- Thermal image dataset acquisition for training
Sub-Projects
Ground Station
Custom Pelican case ground station with integrated computer, battery, radio, and display. Designed for rapid deployment and portable operations.
Thermal Classification
Edge ML system for real-time animal classification from thermal imagery. Training dataset being collected through manual flight operations.
Roadmap
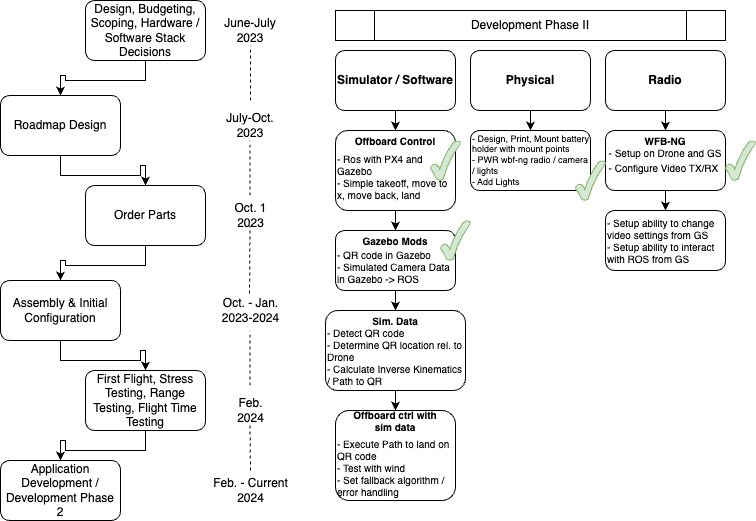
Phase II (Current): Precision landing, LED control, video streaming, offboard control guardrails
Phase III (Next): Thermal camera integration, image classification, notification system
Future Applications
Swarms: Multi-drone coordination with self-assembling “Drone Area Network (DAN)” communication protocol
Heavy Lift: Long-range cargo transport (moonshot: shipping container transport, 150 mile range)
Magnetotellurics: Drone swarm-based resource exploration for mining/energy industries