
I’m a software engineer focused on autonomous systems, data infrastructure, and hardware integration. I build things that solve real problems, from autonomous drones for wildlife management to distributed data pipelines processing millions of rows daily.
Currently working as a Senior Software Engineer at Cred-IQ, where I architect cloud infrastructure, build data pipelines, and develop backend systems in Rust and Python.
Background
Education: B.S. Computer Science (AI/ML focus) from Southern Methodist University, 2021
Interests: Autonomous systems, edge computing, RF/antenna theory, IoT, data engineering
University Projects
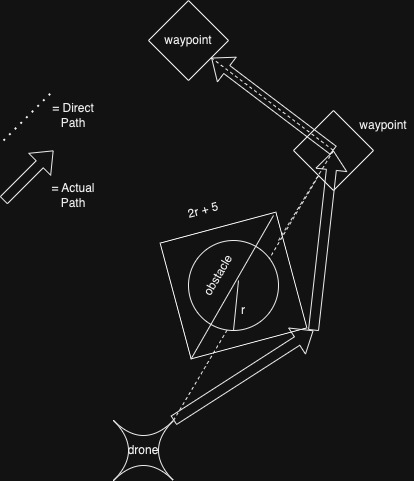
SMU Robotics Club - DARPA Competition
Built mission planning and obstacle avoidance systems for autonomous hexacopter UAV. Developed JSON-to-flight-plan converter and pathfinding algorithms for dynamic obstacle avoidance.
Mustang Rocketry - Team Lead, Avionics & Payload
Led design and implementation of separation systems and radio telemetry for 10,000 ft rocket competition. Designed ad-hoc network protocol for payload testing.


Outside of Work
Aviation: Private pilot (high performance rating). Working toward instrument rating.
Hardware/Electronics: Homelab with microcontrollers, Raspberry Pis, and networking equipment running local services and Airflow workflows. Active interest in RF theory and SDR.
Gardening: Building automated garden systems to explore sustainable food production and scalable agriculture tech.
Outdoors: Skiing, golf, hiking.